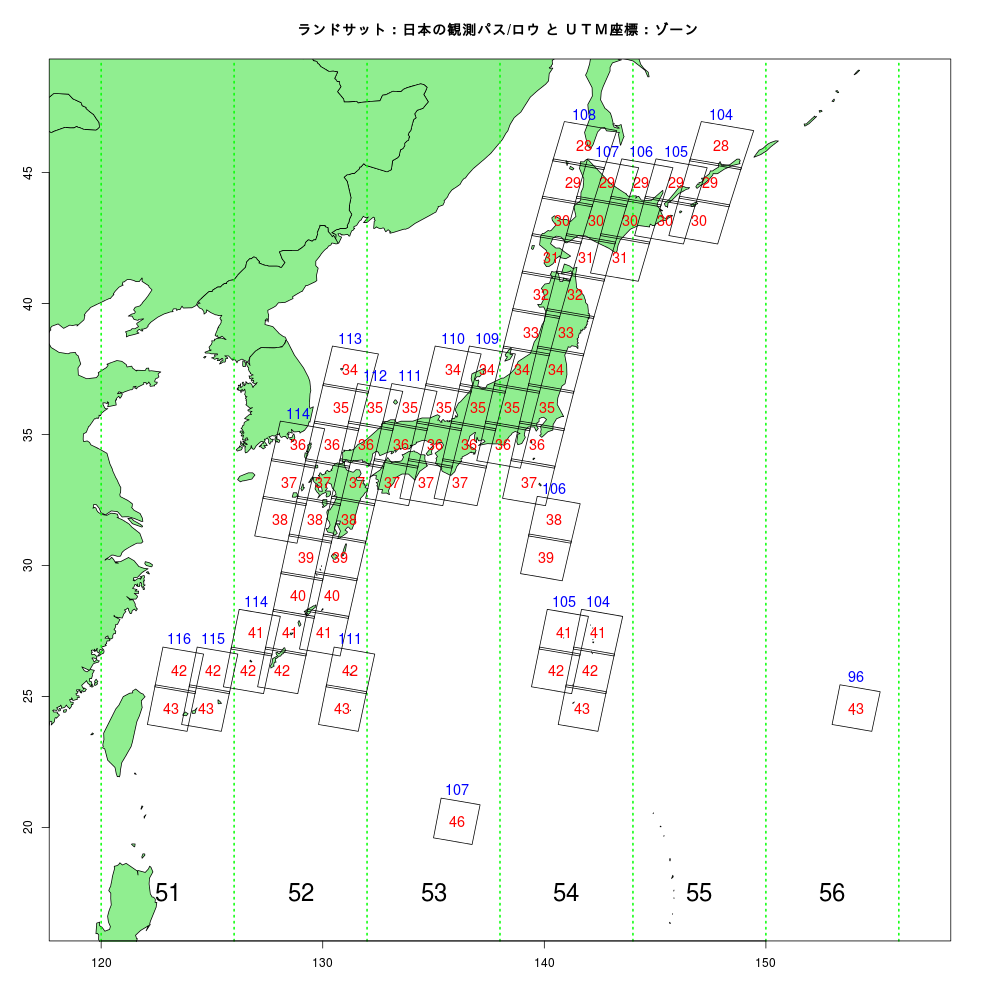
library(sp) library(maptools) library(raster) library(mapdata) library(wrspathrow) #png("PathRow.png",width=1000,height=1000) map('worldHires',fill=T,col="lightgreen",xlim=c(118,158),ylim=c(16,49)) title("ランドサット:日本の観測パス/ロウ と UTM座標:ゾーン ") #map.axes(cex.axis=0.8,las=1) abline(v=seq(120,156,6),lty=3,col="green",lwd=2) #text(123,20,"ゾーン",col="red") text(seq(123,153,6),17.5,c("51","52","53","54","55","56"),col="black",cex=2) map.axes() #観測範囲、row表示 x<-rep(c(96,104:116),c(1,6,4,5,10,9,4,4,5,7,9,5,2,2)) y<-c(43,28:30,41:43,29:30,41:42,29:31,38:39,29:37,46,28:36,34:37,34:37,35:37,42:43,35:41,34:42,36:38,41:42,42:43,42:43) #path表示 x1<-c(96,104,104,105,105,106,106,107,107,108,109,110,111,111,112,113,114,114,115,116) y1<-c(43, 28, 41, 29, 41, 29, 38, 29, 46, 28, 34, 34, 35, 42, 35, 34, 36, 41, 42, 42) for (i in 1:73){ plot(pathrow_poly(x[i],y[i]),add=T) text(pathrow_poly(x[i],y[i])[[4]],pathrow_poly(x[i],y[i])[[5]],as.character(y[i]),col="red",cex=1.2) } for (i in 1:20){ text(pathrow_poly(x1[i],y1[i])[[4]],pathrow_poly(x1[i],y1[i])[[5]]+1.2,as.character(x1[i]),col="blue",cex=1.2) } #dev.off()
|